目 录
摘 要.............................. I
目 录............................ III
1 绪论.............................. 1
1.1课题研究相关背景................... 1
1.2课题主要研究内容................... 3
2 运动系统设计....................... 4
2.1底盘设计........................... 4
2.2 SLAM建图 ......................... 8
2.3 路径规划......................... 12
2.4 本章小结......................... 14
3物联网系统设计.................... 15
3.1感知系统设计...................... 15
3.2本章小结.......................... 17
4交互系统设计...................... 18
4.1语音交互设计...................... 18
4.2 屏幕交互设计..................... 23
4.3 本章小结......................... 23
5实现与测试........................ 25
5.1 底盘运动稳定测试................. 25
5.2 slam建图测试..................... 25
5.3 路径规划测试..................... 28
5.4 物联网功能测试................... 29
5.4 本章总结......................... 29
6总结与展望........................ 30
参考文献........................... 31
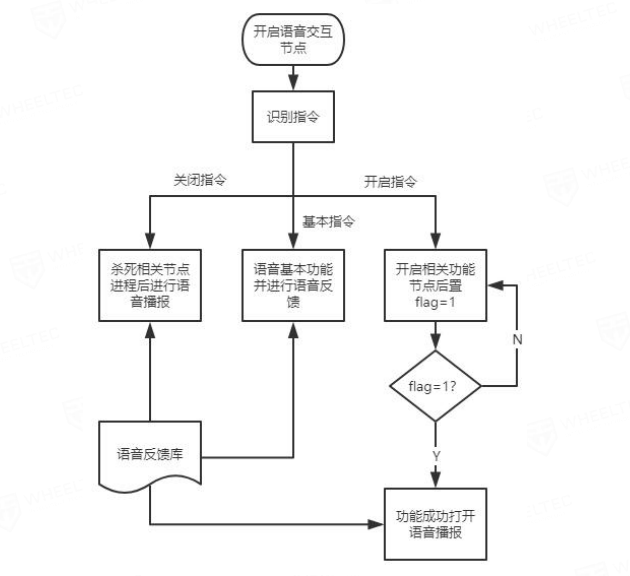
图4-11 程序设计结构
Figure 4-11 Program design structure
参考文献
[1]王冉冉. 非遗传承视角下徐州香包可持续设计研究[D].中国矿业大学,2021.
[2]李丹.我国非物质文化遗产保护工作中的问题及对策研究[J].文化产业,2022(13):74-76.
[3]赵鸽鸽. 室内服务机器人SLAM及路径规划关键技术研究与实现[D].桂林理工大学,2020.
[4]王鹏. 无人车SLAM技术和路径规划算法研究[D].哈尔滨工业大学,2021.
[5]章弘凯,陈年生,代作晓,范光宇.一种多层次数据融合的SLAM定位算法[J].机器人,2021,43(06):641-652.
[6]谢朋廷. ROS通信机制的形式化建模与验证[D].北京交通大学,2021.
[7]裴翦. 基于ROS的室内定位及路径规划系统的研究与实现[D].山东建筑大学,2021.
[8]郭彦超. 无人车路径规划与自主避障算法研究[D].北京交通大学,2021.
[9]鲍久圣,张牧野,葛世荣,刘琴,袁晓明,王茂森,阴妍,赵亮.基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划[J].煤炭学报,2022,47(03):1347-1360
[10]齐国栋. 基于ROS的轮式机器人路径规划技术研究[D].大连理工大学,2021.
[11]孙殿斌. 基于ROS的轮式移动机器人仿真平台设计与实现[D].华中科技大学,2020.
[12]王聪. 图书馆巡盘运服务机器人导航系统研究[D].南京邮电大学,2021.
[13]郭铭,王佳佳.基于STM32的智能家居湿度控制系统[J].内蒙古科技与经济,2021.
[14]王毅,万英.基于IIC总线的温湿度测量系统的设计[J].福建师范大学学报(自然科学版),2014,30(06):40-45+61.
[15]李佳泽,刘浩.五元十字麦克风阵列声源定位算法研究[J].信息技术与信息化,2021(09):42-46.
[16] Yun-Ke Luo, Si-Xin Chen, Lu Zhou, Yi-Qing Ni. Evaluating railway noise sources using distributed microphone array and graph neural networks,2022.
[17] A. S. Subramanian et al., "Far-Field Location Guided Target Speech Extraction Using End-to-End Speech Recognition Objectives," ICASSP 2020 - 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2020.
[18] Linkai Bu and T. . -D. Church, "Perceptual speech processing and phonetic feature mapping for robust vowel recognition," in IEEE Transactions on Speech and Audio Processing, vol. 8, no. 2, pp. 105-114, March 2000.
[19] H. Baba, N. Onishi, Y. Sakashita, H. Tokizawa and H. Tanaka, "Development of a voice speed control system LSI," in IEEE Transactions on Consumer Electronics, vol. 41, no. 3, pp. 909-916, Aug. 1995.
[20] Hye-Jin Kim, Jae-Yeon Lee, Kyung-suk Bae, Keun-Chang Kwak and Ho-Sub Yoon, "Network-based voice component framework for human robot interaction," 2007 International Symposium on Communications and Information Technologies, 2007.

